from scipy.optimize import minimize
from shapely.geometry import Point, Polygon
import matplotlib.pyplot as plt
# 定义多边形
polygon_coords = [
(0.177, 0),
(0.176, -0.0375),
(0.175, -0.075),
(0.165, -0.1125),
(0.155, -0.15),
(0.1335, -0.176),
(0.112, -0.202),
(0.06413, -0.202),
(0.01626, -0.202),
(-0.03161, -0.202),
(-0.07948, -0.202),
(-0.12735, -0.202),
(-0.17522, -0.202),
(-0.22309, -0.202),
(-0.27096, -0.202),
(-0.31883, -0.202),
(-0.3667, -0.202),
(-0.395, -0.1963),
(-0.4115, -0.1739),
(-0.428, -0.1515),
(-0.432925, -0.113625),
(-0.43785, -0.07575),
(-0.442775, -0.037875),
(-0.4477, 0),
(-0.442775, 0.037875),
(-0.43785, 0.07575),
(-0.432925, 0.113625),
(-0.428, 0.1515),
(-0.4115, 0.1739),
(-0.395, 0.1963),
(-0.3667, 0.202),
(-0.31883, 0.202),
(-0.27096, 0.202),
(-0.22309, 0.202),
(-0.17522, 0.202),
(-0.12735, 0.202),
(-0.07948, 0.202),
(-0.03161, 0.202),
(0.01626, 0.202),
(0.06413, 0.202),
(0.112, 0.202),
(0.1335, 0.176),
(0.155, 0.15),
(0.165, 0.1125),
(0.175, 0.075),
(0.176, 0.0375),
(0.177, 0),
]
polygon = Polygon(polygon_coords)
polygon_area = polygon.area
print("多边形面积:", polygon_area)
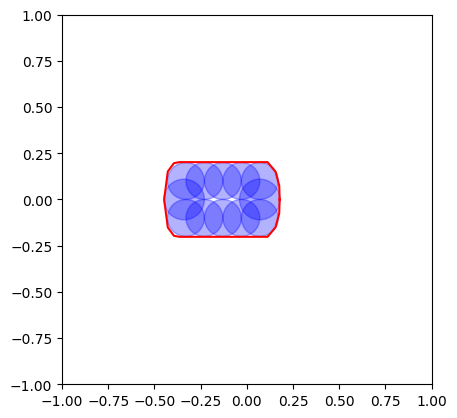
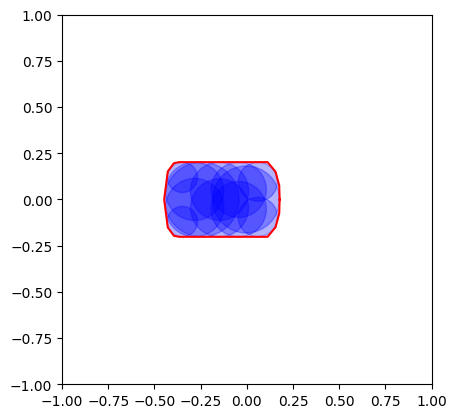
# 圆的数量
num_circles = 12 # 可以根据需要调整这个值
# 初始化猜测
xs = [-0.13, -0.13, -0.03, -0.03, -0.23, -0.23, 0.07, 0.07, -0.33, -0.33, -0.34, 0.07]
ys = [0.1, -0.1, 0.1, -0.1, 0.1, -0.1, 0.1, -0.1, 0.1, -0.1, 0, 0]
rs = [0.1, 0.1, 0.1, 0.1, 0.1, 0.1, 0.1, 0.1, 0.1, 0.1, 0.11, 0.11]
initial_guess = xs + ys + rs
# 边界条件
x_bounds = [(-1, 1) for _ in range(num_circles)]
y_bounds = [(-1, 1) for _ in range(num_circles)]
r_bounds = [(0.05, None) for _ in range(num_circles)]
bounds = x_bounds + y_bounds + r_bounds
# 定义目标函数
def objective(vars):
xs = vars[0:num_circles]
ys = vars[num_circles : 2 * num_circles]
rs = vars[2 * num_circles : 3 * num_circles]
circles = [Point(xs[i], ys[i]).buffer(rs[i]) for i in range(num_circles)]
union_area = circles[0]
sum_area = circles[0].area
for circle in circles[1:]:
sum_area += circle.area
union_area = union_area.union(circle)
return union_area.area - union_area.intersection(polygon).area
def coverage_constraint(vars):
xs = vars[0:num_circles]
ys = vars[num_circles : 2 * num_circles]
rs = vars[2 * num_circles : 3 * num_circles]
circles = [Point(xs[i], ys[i]).buffer(rs[i]) for i in range(num_circles)]
union_area = circles[0]
for circle in circles[1:]:
union_area = union_area.union(circle)
covered_area = union_area.intersection(polygon).area
return covered_area - 0.98 * polygon_area
# 约束条件
constraints = [
{"type": "ineq", "fun": coverage_constraint},
]
# 执行优化
result = minimize(
objective, initial_guess, method="SLSQP", bounds=bounds, constraints=constraints
)
# 解析结果
xs = result.x[0:num_circles]
ys = result.x[num_circles : 2 * num_circles]
rs = result.x[2 * num_circles : 3 * num_circles]
print("最优解:", result.fun)
# 绘制结果
fig, ax = plt.subplots()
for x, y, r in zip(xs, ys, rs):
print("x: ", x, "y: ", y, "r: ", r)
circle = plt.Circle((x, y), r, color="blue", fill=True, alpha=0.3)
ax.add_patch(circle)
x, y = polygon.exterior.xy
ax.plot(x, y, "r")
ax.set_xlim(-1, 1)
ax.set_ylim(-1, 1)
ax.set_aspect("equal")
plt.show()