基于搜索的路径规划
两个基本任务
- Exploration 探索
- Exploitation 利用
1. 找可行解的算法
1.1 PRM(Probabilistic Road Map)
-
Learning phase

- 在地图中随机撒点
- 对每个点进行碰撞检测,如果碰撞,则删除该点
- 找到每个点的邻居,连线,如果连线碰撞,则删除该线
-
Query phase
- 使用图搜索算法(Dijkstra, A*, JPS)在PRM图上寻找从起点到终点的路径
1.2 RRT(Rapidly-exploring Random Tree)

2. 找最优解的算法
2.1 RRT(Rapidly-exploring Random Tree)

工程实现
- Bias Sampling: 有一定概率采样到目标点
- Sample Rejection: 如果 g + h > c*,则拒绝该采样点
- Branch-and-bound: 剪枝,也需要 Trade-off,影响最优性
- Graph Sparsify: 稀疏化,影响最优性
- Neighbor Query: K近邻或半径查询
- Delay Collision Check: 延迟碰撞检测
- Bi-directional Search: 双向搜索
- Conditional Rewire: 找到第一个解后,进行Rewire
3. 加速收敛速度的算法
3.1 RRT
从利用角度:有些节点没有必要被利用,有些节点可以被利用得更充分
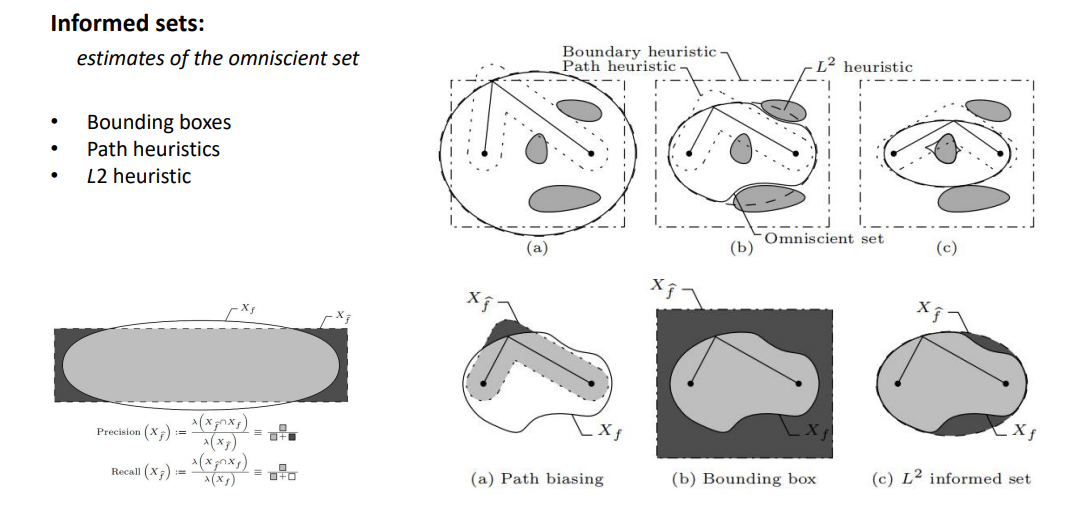
3.2 Informed RRT*
从探索角度:只有在Informed set内采样才有用