动力学约束下的运动规划
1. Kinodynamic: Kinematic + Dynamics
- Kinematic: 运动学,考虑避障
- Dynamics: 动力学,考虑力、力矩等动力学量
为什么需要在路径规划的时候考虑动力学约束?
 考虑动力学约束搜索出的路径(绿色实线)与不考虑动力学约束搜索出的路径(紫色实线)的拓扑结构不同,会影响后续轨迹优化的结果
考虑动力学约束搜索出的路径(绿色实线)与不考虑动力学约束搜索出的路径(紫色实线)的拓扑结构不同,会影响后续轨迹优化的结果
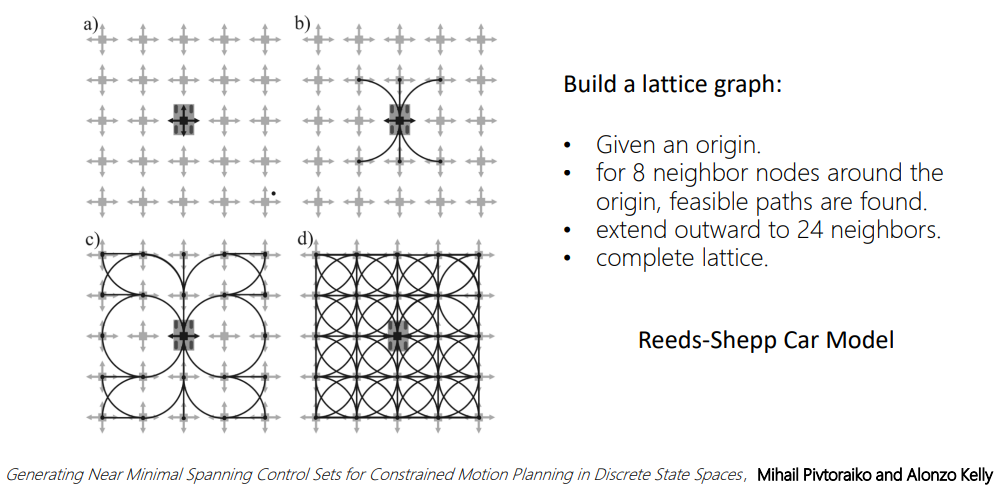
2. 状态栅格搜索算法 (State Lattice Planning)
2.1 在控制空间采样
\(\dot{s} = f(s, u)\),给定\(s_0\),对输入\(u\)进行采样,得到\(s_1\)
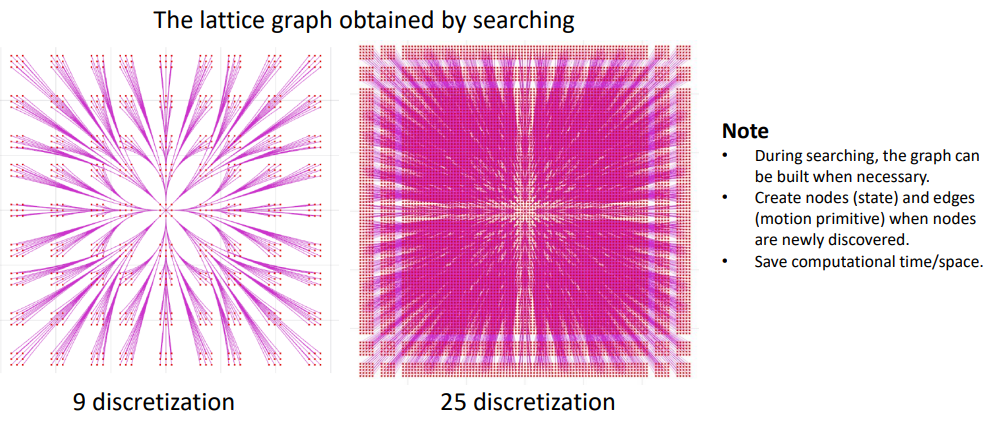
2.2 在状态空间采样
\(\dot{s} = f(s, u)\),采样不同的\(s\),计算\(u, T\)
3.两点边界值最优控制问题 (BVP & OBVP)
3.1 BVP (Boundary Value Problem)
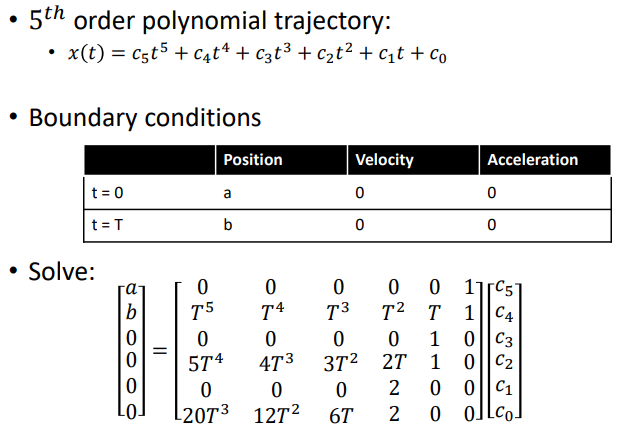
3.2 OBVP (Optimal Boundary Value Problem)
3.2.1 建模
目标:\(\min J_{\sum} = \sum_{k=1}^{3} J_k, J_k = \frac{1}{T}\int_0^T j_k(t)^2dt\) 状态: \(s_k = (p_k, v_k, a_k)\) 输入: \(u_k = j_k(t)\) 系统模型: \(\dot{s}_k = f_s(s, u) = (v, a,j)\)