基于优化的轨迹规划
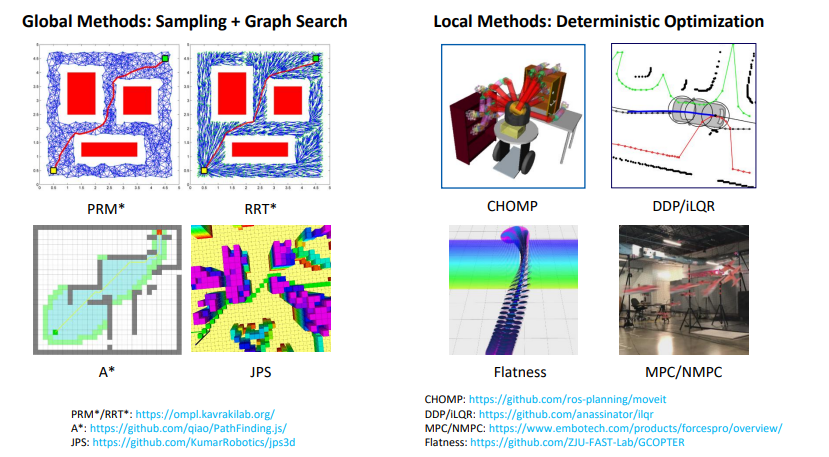
1. 全局方法 和 局部方法
2. 轨迹规划
2.1 什么是轨迹
时间参数化的路径
2.2 平滑意味着什么
- 满足动力学约束 \(\dot{x} = f(x, u)\)
- 最小化能量泛函 \(min \int_{t_0}^{t_f} L(x(t), u(t)) dt\)
2.3 为什么需要轨迹优化
- 能量最优
- 时间最优
- 驱动器限制
- 任务需求 (保持fov)
3. 微分平坦(Differential Flatness)
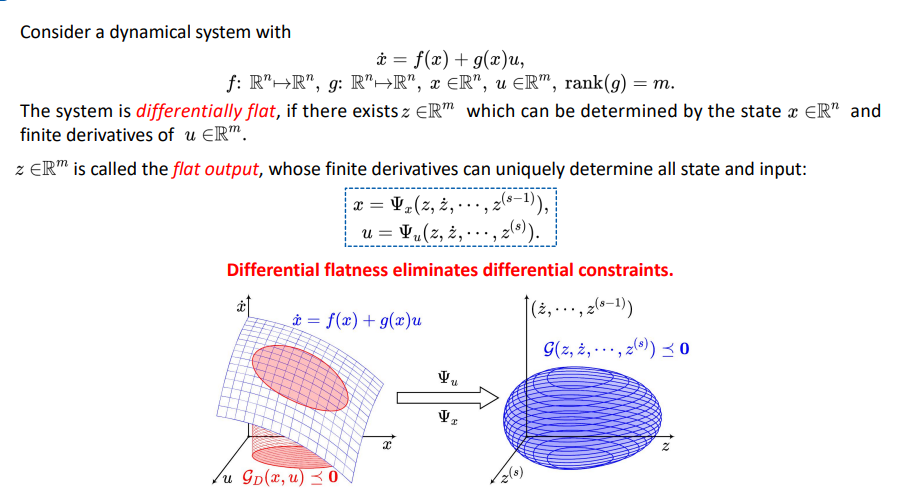
微分平坦是使用系统的输出和输出的导数对系统的状态\(x\)和输入\(u\)进行描述,从而把系统方程\(\dot{x} = f(x) + g(x)u\)约束消掉